
Research
Pulmonary Robotics
One of our main research projects is on developing a robotic platform for remote navigation of lungs in critically ill patients. We are developing robotic hardware, sensors, navigation algorithms, UI, etc. Some of the research topics we are currently working on include:
Data-driven Modelling and Control of Continuum Robots

A research question we are keen to answer is how to model flexible instruments inside body in the presence of disturbances. For instance, when they are bent under external forces when they are in contact with tissue. We are specifically interested in explainable models that can be used to study safety issues while providing insight into how to automate the procedure. One example shown is a flexible robot steered inside phantom tissue, simulating lung sampling. The robot has no knowledge of the tissue dynamics and learns how to interact with it as it goes in and uses this information to reach a pre-defined target.
Related papers:
B. Thamo, et. al., “Data-Driven Steering of Concentric Tube Robots in Unknown Environments via Dynamic Mode Decomposition,” in IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 856-863, Feb. 2023, doi: 10.1109/LRA.2022.3231490.
M. Kasaei, et. al., “A Data-efficient Neural ODE Framework for Optimal Control of Soft Manipulators2, Annual Conference on Robot Learning(CORL), 2023.
Video:
https://youtu.be/i3q4i8fMkVI?si=0wyCaL6RUtgVYB0o
Inner Body SLAM
Our current research aims to find solutions for lung navigation in critical care. We are particularly developing a pipeline that uses only the visual feedback from an endoscope steered inside the lung to develop a real-time map of the lung, while localizing the position of the endoscope within that map. Such a map can be used to take samples from a patient and return to the same spot for re-sampling or the delivery of targeted therapies.This capability is essential for democratizing patient care in critical care.
A specific area of our focus within this pipeline is the application of AI, especially vision transformers, for odometry under uncertainty inside the lung.
Related papers:
J. Deng, et. al., “Feature-based Visual Odometry for Bronchoscopy: A Dataset and Benchmark,” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), , doi: 10.1109/IROS55552.2023.10342034.
E. Makute, et. al. ” On Challenges of Monocular Pose Estimation for Endoluminal Navigation”, Journal of Medical Robotics Research, 2024.
Shape Sensing

We are focused on developing algorithms and technologies for real-time shape sensing and localization of flexible instruments within the body. For instance, we are exploring the use of Fiber Bragg Grating (FBG)-based distributed sensing for high-resolution and high-frequency shape sensing. The figure illustrates one of our developed algorithms that enhances spatial resolution in shape sensing within human lungs.
Additionally, we are working on creating both model-based and data-driven algorithms that utilize positional measurements from a single point on an instrument, tracked over time using commercial sensors like electromagnetic trackers, to estimate the instrument’s overall shape.
Related papers:
D. Hanley, et. al., “On the Tradeoff Between Spatial Resolution and High Curvature Bending in FBG-Based Shape Sensing,” in IEEE Sensors Journal, vol. 23, no. 23, pp. 29003-29010, 1 Dec.1, 2023, doi: 10.1109/JSEN.2023.3326849.
Emile Mackute, et. al., “Shape Estimation of Concentric Tube Robots Using Single Point Position Measurement.” in IEEE IROS Proceedings, 2021.
Videos:
https://youtu.be/tF6g4BGHTnQ?si=RuZY07z4d3xEfCq3
Robotics-assisted Needle Steering

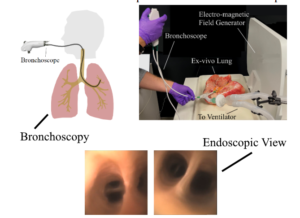
Needle steering is a method used to control and guide a needle through soft tissues in the body, which is particularly important in precise medical procedures like biopsies in difficult-to-reach areas. One of our projects focuses on robotic-assisted needle steering for endomicroscopy. Endomicroscopy, which utilizes light properties to produce real-time microscopic images of tissue, offers valuable insights into disease processes. However, its application has been limited mainly to surface or near-surface conditions due to the lack of technology for targeted and automated optical fibre delivery. Our work involves developing a robotic platform that uses steerable needles to guide endomicroscopic fibres into deep tissues for imaging.
The accompanying figure illustrates exemplary needle-based operations, our proposed platform, and its potential applications in controlled imaging inside an ex-vivo lung model.
Additionally, we are investigating the geometric aspects of needle steering. Our goal is to model the interaction of a needle with surrounding tissue in terms of geometric constraints. By understanding and applying these constraints, we aim to achieve precise needle steering, enhancing the effectiveness and safety of this technology.
B. Thamo, et al., “Towards Robotics-Assisted Endomicroscopy in Percutaneous Needle-Based Interventions,” in IEEE Transactions on Medical Robotics and Bionics, doi: 10.1109/TMRB.2023.3337869.
M Khadem, et. al., “Geometric control of 3D needle steering in soft-tissue”, Automatica, Volume 101, 2019, 36-43, doi: 10.1016/j.automatica.2018.11.018.
Videos:
https://youtu.be/EuURVIQsQ-M?si=cPKhKuVAi6_mMGGG
Soft Robots for Multiscale Manipulation
This work is part of the EU Horizon 2020 project titled ‘Harmony: Enhancing Healthcare with Assistive Robotic Mobile Manipulation.’ More details are available at https://harmony-eu.org/.
We are especially interested in using flexible and soft robots to automate manipulation tasks in hospitals and research labs. The demand for collaborative robots that can function in constrained and potentially contaminated environments is growing. A soft robot, with its inherent flexibility, can safely interact with users and the surrounding environment during object manipulation. Additionally, its shape-changing capability allows it to perform tasks in confined spaces. The accompanying figure illustrates one of our robots, designed to remotely manipulate test tubes

Related papers:
M. Kasaei, et. al.,, “Data-efficient Non-parametric Modelling and Control of an Extensible Soft Manipulator,” 2023 IEEE International Conference on Robotics and Automation (ICRA), doi: 10.1109/ICRA48891.2023.10161275.